Are you tired of sensor readings that drift and cause frustrating product failures? You chose a strong magnet, but your device's accuracy is still inconsistent, leading to unreliable performance and angry customers.
Yes, the issue is rarely the magnet's strength but its magnetic field uniformity1 and thermal stability2. For sensor applications, selecting a magnet with a consistent magnetic field waveform and a low temperature coefficient3 is the key to achieving reliable, repeatable accuracy and avoiding signal noise4 .
I once worked with an automotive engineer who was about to miss a project deadline. His new steering angle sensor was failing validation tests, with readings drifting wildly after temperature cycling. He had specified a strong N42SH magnet, which on paper was perfect. But the problem wasn't the magnet's power; it was its precision. The magnetic field it produced was not uniform, and its strength changed too much with temperature. We switched him to a magnet where we guaranteed the magnetic waveform consistency5 and a lower thermal drift. The problem disappeared. For sensor design6, the magnet is not just a component; it's a precision instrument. Let’s dive into how to select one like an expert.
Why Does a 'Good Enough' Magnet Lead to Sensor Failure?
Are you frustrated by sensor data that is noisy or inconsistent from one device to the next? You assume your magnet supplier is providing the same product, but your end-of-line testing tells a different story.
A sensor doesn't measure brute force; it measures a precise magnetic field at a specific point. A "good enough" magnet with poor field uniformity, high thermal drift, or inconsistent batch-to-batch properties will create an unstable signal, directly causing sensor inaccuracy and field failures.
Many engineers and procurement managers fall into the trap of applying motor magnet logic to sensor applications. For a motor, maximizing torque is often the primary goal. But for a sensor, you are translating a magnetic field into data. If that field is "noisy" or changes with temperature, your data will be garbage. It's a classic "garbage in, garbage out" problem. The stability of the magnetic field is critical for the accuracy and reliability of precision instruments7.
Here’s a breakdown of what really matters:
| Engineering Goal | For a Motor Magnet | For a Sensor Magnet |
|---|---|---|
| Primary Metric | Max Energy Product ((BH)max) | Magnetic Field Uniformity & Stability |
| Key Concern | Resisting demagnetization from high loads | Preventing signal drift with temperature |
| Grade Priority | High Coercivity (Hcj) (e.g., SH, UH) | Low Temp. Coefficient (TC of Br) |
| Most Critical Spec | Mechanical Strength & Tolerance | Batch-to-batch Magnetic Consistency |
A seemingly small inconsistency in the magnet's material or magnetization can create huge variations in sensor output. This is why specifying waveform uniformity and using a supplier who can prove it is non-negotiable for high-performance sensors.
Are You Using the Same Magnet for a Hall Sensor and a Reed Switch?
Do you believe that all magnetic sensors are basically the same? This is a dangerous oversimplification that leads to over-engineering simple designs or, worse, causing high-precision systems to fail unexpectedly.
Absolutely not. Each sensor type has unique magnetic requirements. A simple Reed switch needs a basic threshold field to turn on/off. A linear Hall sensor requires a predictable field strength over a specific travel distance, while a high-resolution encoder needs a complex multi-pole magnet for precision angular detection.
I always start a conversation with a client by asking what type of sensor they are using. The answer completely changes my recommendation. For example, using a high-cost, multi-pole ring magnet for a simple cabinet door switch is a waste of money. Conversely, using a simple disc magnet for a high-resolution robotic joint encoder is a recipe for failure.
Here’s how to think about it:
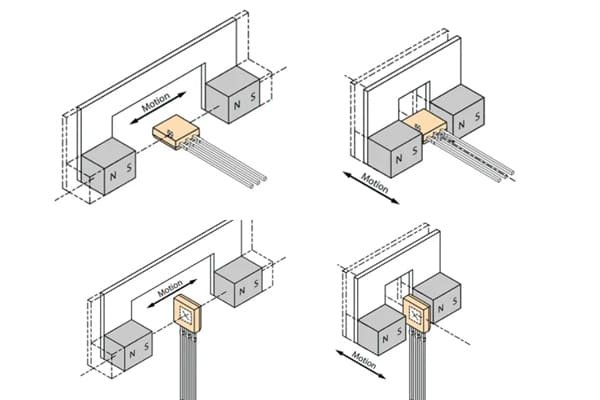
- Hall Effect Sensors8: These are incredibly versatile. A linear Hall sensor measures the strength of the field, making them great for position sensing. The key here is a magnet that provides a predictable and consistent field change as it moves. 2D/3D Hall sensors can even detect field direction, enabling more complex joystick or control knob designs.
- Magnetoresistive (MR/TMR) Sensors: These are the high-sensitivity champions, perfect for high-precision encoders. They are much more sensitive than Hall sensors, meaning they can work with weaker magnetic fields or at greater distances. However, their high sensitivity also means they are more demanding of magnetic field quality and uniformity.
- Reed Switches: These are the simplest magnetic sensors—essentially a switch activated by a magnetic field. They don't need a fancy, shaped field. They just need a magnet strong enough to actuate the switch at the desired distance. For these, a simple, low-cost ferrite or standard NdFeB disc is often the perfect choice.
Is Sintered NdFeB Always the Best Choice for Your Sensor?
Is your default move to specify the strongest magnet available—sintered NdFeB9? This can be an expensive mistake, locking you into a solution that is difficult to manufacture and poorly suited for modern, compact sensor design6s.
No. While sintered NdFeB9 is the strongest, bonded NdFeB10 is often the smarter choice for sensors. Bonded NdFeB allows for the injection molding of complex, high-precision multi-pole shapes and has better corrosion resistance, making it ideal for compact encoders and IoT devices.
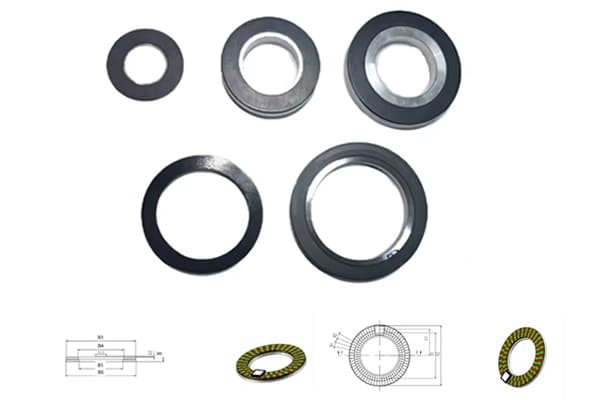
This is a critical insight, especially for designers of small, high-tech devices. Sintered NdFeB magnets are produced from a solid block and then cut and ground to shape, which makes complex shapes difficult and costly. Bonded magnets, on the other hand, mix NdFeB powder with a binder (like nylon) and are injection-molded into their final shape. This opens up a world of design possibilities.
Here is a practical comparison for sensor applications:
| Feature | Sintered NdFeB | Bonded NdFeB | Ferrite |
|---|---|---|---|
| Magnetic Strength | Highest | Medium | Low |
| Shape Complexity | Low (brittle, hard to machine) | High (injection molded) | Medium |
| Multi-pole Magnetization | Difficult & Expensive | Excellent & Precise | Possible but weak |
| Dimensional Accuracy | Good (±0.05mm typical) | Excellent (as-molded) | Fair |
| Corrosion Resistance | Poor (requires coating) | Good (binder protects powder) | Excellent |
| Best Application | Long air-gap sensing, simple shapes | High-resolution encoders, complex shapes, IoT | Low-cost Reed switches11 |
My material insight is this: use Bonded NdFeB for complex multi-pole shapes needed in IoT and consumer electronics. For high-temperature automotive applications or where strong external magnetic fields are a concern, you must prioritize high-Hcj sintered NdFeB or even Samarium Cobalt (SmCo) magnets.
Does a Multi-pole Magnet Really Improve Sensor Precision?
Are you wondering if multi-pole ring magnets are an expensive gimmick? You see them in high-end robotics and automotive sensors, but you aren't sure if they are necessary for your design.
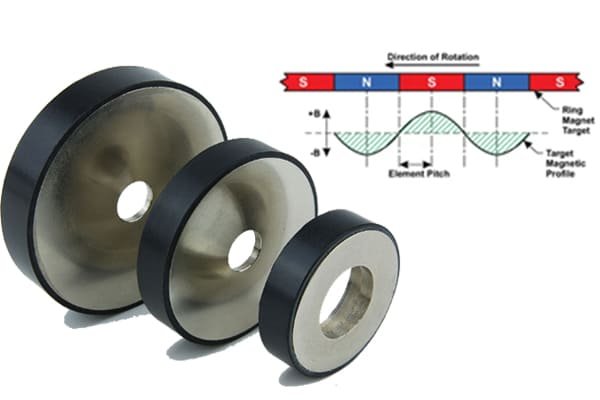
Yes, for any application needing high-resolution angle or speed feedback, multi-pole magnets12 are absolutely essential. Instead of one North and one South pole, they have many alternating poles on a single face, allowing a sensor to detect tiny rotational movements with extreme precision.
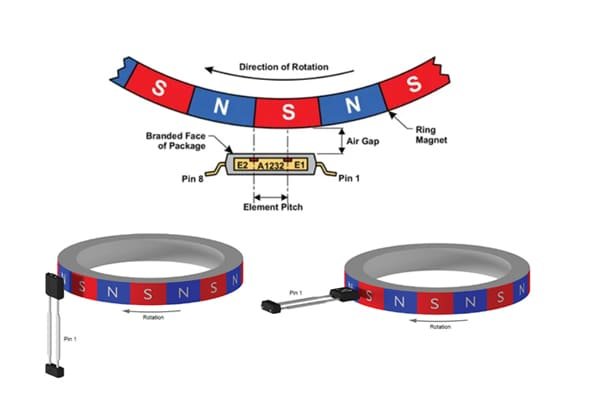
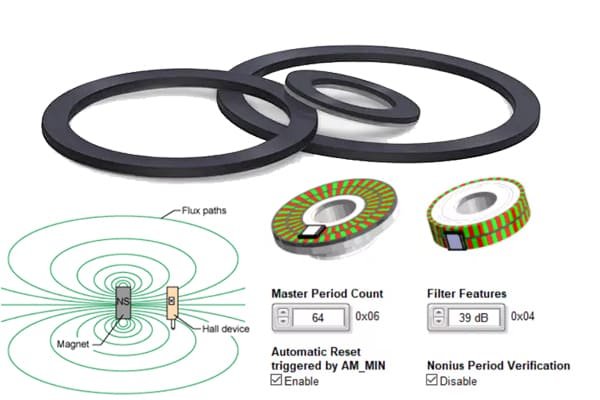
Think of it this way: a simple diametrically magnetized disc can tell you if it has made roughly a half-turn. But a 64-pole ring magnet can tell you, with the right sensor, that it has turned just 5.6 degrees. This is the foundation of modern magnetic encoders used in everything from robotic joints to automotive steering systems.
The engineering principle is straightforward:
- Single-Pole Magnetization (Axial/Diametrical): Creates a simple, large magnetic field. This is good for basic tasks like activating a reed switch or simple proximity sensing.
- Multi-Pole Magnetization: Creates a series of smaller, rapidly changing magnetic fields right at the surface of the magnet. As the magnet rotates, the sensor reads these rapid transitions from North to South. More poles mean more transitions per rotation, which equals higher resolution.
Here is a design insight I share with all my clients building encoders: the multi-pole design must start from your sensor's specifications. You need to define the number of poles and the pole pitch (the distance from one pole to the next) to ensure the magnetic field waveform your sensor reads stays within its ideal linear range, which minimizes distortion and ensures accuracy.
Is Your 'Signal Noise' Actually 'Magnet Noise'?
Are you spending weeks trying to filter out electronic noise and signal jitter from your sensor? You've checked your power supply and shielding, but the readings are still unstable. Have you considered the magnet itself?
Very likely. 'Magnet noise'—inconsistency in the magnet's field strength and shape—is a hidden cause of signal instability. This can come from poor material quality, dimensional inaccuracies, or faulty magnetization. No amount of electronic filtering can fix a physically flawed magnetic signal at its source.
This is the most overlooked aspect of sensor magnet selection. You can buy two magnets that have the same grade, size, and surface gauss reading, but one produces a clean signal while the other produces a noisy, distorted one. Why? Because surface gauss only measures the field strength at one point. It tells you nothing about the uniformity of the field across the entire magnet or the consistency of the magnetic waveform.
Here are the culprits behind "magnet noise":
- Material Defects: Inconsistent mixing of raw materials leads to "dead spots" or "hot spots" in the magnet.
- Dimensional Inaccuracy: If a ring magnet is not perfectly round or its walls are not an even thickness, the magnetic field will be lopsided.
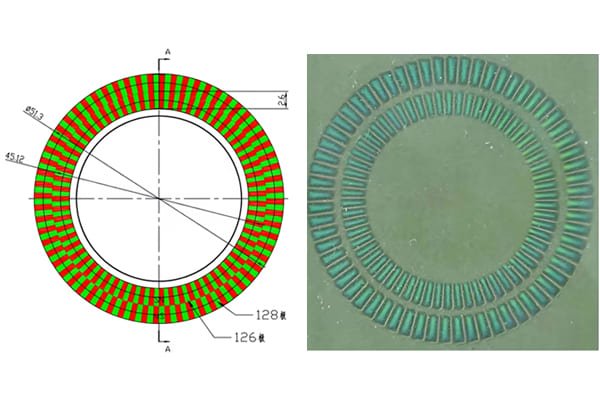
- Magnetization Errors: If the fixture used to magnetize a multi-pole ring is not perfectly aligned, the poles will be unevenly spaced, resulting in a distorted signal waveform.
My reliability insight for every sensor customer is to specify magnetic waveform uniformity in your purchase order, not just surface gauss. A quality supplier like MagniPro can provide test reports showing the actual signal output, guaranteeing the consistency you need for a stable and accurate sensor system.
Conclusion
For sensor applications, selecting a magnet is an act of precision engineering. Success depends not on raw strength, but on the uniformity, thermal stability2, and consistency of the magnetic field.
Stop Guessing and Start Engineering Your Sensor Magnet
Choosing the wrong magnet can doom your project with unreliable data and field failures. Don't let a "good enough" magnet compromise your design. My job is to help you engineer the right solution. Send me your sensor specifications, operating temperature, and dimensional constraints. My team and I will provide a technical recommendation and quote from our IATF16949-certified facility to ensure your sensor performs with the accuracy and reliability you demand.
Understanding magnetic field uniformity is crucial for sensor accuracy. Explore this resource to learn how it impacts performance. ↩
Thermal stability is key for reliable sensor readings. Discover how it influences accuracy in this informative article. ↩
The temperature coefficient affects magnet performance. Learn why it's crucial for sensor applications in this guide. ↩
Signal noise can lead to inaccurate readings. This resource explains its causes and solutions for better sensor performance. ↩
Magnetic waveform consistency ensures reliable sensor data. Learn more about its significance in this detailed guide. ↩
Effective sensor design requires careful planning. Explore this article for essential considerations and best practices. ↩
Precision instruments are crucial in engineering. Learn what makes them effective in this informative resource. ↩
Hall Effect Sensors are versatile tools in sensing technology. Discover their applications and benefits in this resource. ↩
Sintered NdFeB magnets are popular, but they have pros and cons. This resource provides a comprehensive overview. ↩
Bonded NdFeB magnets offer unique advantages for sensor applications. Explore this article to understand their benefits. ↩
Reed switches are simple yet effective sensors. This article explains their operation and use cases. ↩
Multi-pole magnets enhance precision in sensors. This resource explains their importance in high-resolution applications. ↩
